Усилиями геологов сегодня на суше большинство крупных месторождений уже разведаны. Многие вовлечены в промышленную отработку. Где найти новые минеральные ресурсы, которые экономика потребляет во всё больших масштабах? Выходом может стать освоение морского дна и дна водоёмов. Но это требует новых технологий.
Во всём мире идёт подготовка к освоению подводных месторождений, и Россия не исключение. Можно сказать, что за подводные запасы в мире скоро развернётся настоящая конкурентная гонка. О том, как у нас в стране готовятся роботизированные комплексы для этой цели, «Про Металл» поговорил с доктором технических наук, профессором, первым заместителем заведующего кафедры «Колёсные машины» МГТУ им. Н.Э. Баумана Кириллом Евсеевым.
— Кирилл Борисович, что именно подвигло ваш университет заняться темой подводных роботов для горной отрасли?
— Существует государственная программа развития университетов «Приоритет-2030», в которой наш вуз участвует с 2021 года. Она направлена на развитие университетов, в т.ч. позволит создать на базе университетских наработок продукты и технологии, имеющие практическое значение для ключевых отраслей нашей экономики, которые впоследствии можно было бы коммерциализировать, найти заказчиков среди частных компаний.
Таким образом можно будет внедрить в производство решения на базе прорывных технологий. Одним из стратегических проектов в рамках программы развития «Приоритет-2030», который финансирует Минобрнауки, стал стратегический проект «Роботех», в рамках которого формируется научно-технический задел по направлению робототехники, который я возглавляю.

Доктор технических наук, профессор, первый заместитель заведующего кафедры «Колёсные машины» МГТУ им. Н.Э. Баумана Кирилл Евсеев.
И одно направлений нашей деятельности — это как раз конструирование наземных, в т.ч. донных роботов для добычи полезных ископаемых. Для этого объединены усилия нескольких кафедр: колёсных машин, многоцелевых гусеничных машин и мобильных роботов, транспортно-технологических средств и оборудования лесного комплекса и подводных робототехнических комплексов и аппаратов. Все имеют свои наработки.
Так, в настоящее время в результате выполнения НИОКР у нас на кафедре накоплен большой опыт в области транспортных средства с электроприводом и роботизированный транспортных средств. Всего в проекте участвуют порядка пятидесяти специалистов.
— Видел в интернете фотографии американского подводного робота, который движется, используя плавники. Ваши изделия будут перемещаться менее экзотичными способами?
— Нам необходимо использовать гусеничный движитель, поскольку колёсный движитель невозможно использовать для движения по грунту с низкой несущей способностью, к которым относятся грунты дна моря и водоёмов. А гусеничный движитель обеспечит требуемую проходимость.
— А в чём особенность той среды, в которой вашим роботам придётся работать?
— В первую очередь это очень агрессивная среда. Солёная морская вода потребует высокой устойчивости к коррозии, кроме этого, воздействие отрицательных температур при работе с частичный погружением. Отдельная проблема — обеспечение связи в этих условиях, применение систем навигации для подводной техники, в том числе необходимо использовать гидроакустические системы и другие (GPS под водой не работает). Проблемой является и необходимость соблюдения в данной среде высоких экологических требований, исключение различных протечек, чтобы ничего никуда не вытекало. То есть нужна высокая герметичность.
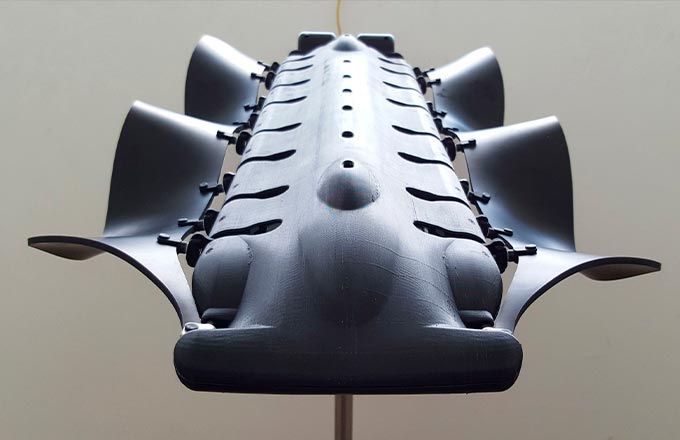
Интернет пестрит фотографиями подводных роботов, в том числе и с такими плавниками.
— Вы планируете использовать этих роботов на какой глубине и на каком отдалении от берега?
— Наши роботы будут связаны с силовой установкой кабелями для подачи электроэнергии, т.к. её на борту робота устанавливать нецелесообразно. Также по кабелю будут подаваться и команды от оператора. Мы рассчитываем, что роботы под водой в определённых условиях смогут действовать и без оператора, в автоматическом режиме, но предусматриваем и возможность управления с земли в зависимости от поставленных задач.
Собственно, расстояние работы зависит от длины кабеля, причём чем он длиннее, тем больше технических проблем: по мере увеличения длины сопротивление кабеля растёт, надо работать с более высоким напряжением и т.д. Сейчас мы рассматриваем прибрежные зоны (и не обязательно только моря — озера или реки тоже). Скажем, глубины — десятки метров, расстояние от берега — сотни метров.
— На какой стадии ваш проект?
— Мы сейчас заняты не только разработкой технологий, но и изучением мест будущей добычи, прорабатываем будущую логистику и так далее. Текущим летом на Чукотку отправится группа наших сотрудников, которые на месторождениях будут исследовать состояние дна, подводные течения, свойства грунтов, солоноватость воды и прочее.
Что же касается самих изделий, то специалисты МГТУ им. Н.Э. Баумана подготовили заявку на НИР, после успешного завершения которой этого можно говорить об ОКРе. К моменту начала выполнения НИР мы рассчитываем привлечь финансирование от компаний-партнёров, заинтересованных в наших роботах. Тот же «Росатом» может участвовать, например. Если говорить о сроках, то хотим иметь функционирующий экспериментальный образец робота примерно через два года. Потом испытания пройдём, подтвердим заявленные характеристики и можно уже говорить об опытном образце.

Специалисты Бауманки предполагают использовать робота на гусеничной основе. Гусеничный движитель обеспечит требуемую проходимость.
— А какие месторождения рассматриваете?
— Совершенно разные: различные донные россыпи, золото, железомарганцевые конкреции и т.д. Так, например, Совиное, Рывеем и др. Некоторые месторождения расположены непосредственно вблизи береговой линии, какие-то вдоль рек и озёр. Во времена СССР большие запасы на материковой части были отработаны, но до сих пор остались россыпи под водой. С тех времен сохранилась некоторая береговая инфраструктура, которую мы можем использовать для работы наших специалистов там на месте — под открытым небом ночевать не придётся.
Возможность добычи того или иного вида полезных ископаемых определяется используемым технологическим оборудованием. Например, на морском дне полезные ископаемые находятся в так называемых конкрециях. Из них можно добывать железо, марганец, никель и так далее. Кроме этого, в зависимости от потребностей заказчика (производительность, энергоэффективность и т.д.) технологическое оборудование может быть разным.
— Совиное — это же росатомовский объект?
— Да, «Атомредметзолота». Но на побережье Чукотки таких объектов известно гораздо больше.
— А как сама добыча будет происходить? Робот будет бегать туда и обратно? И чем он лучше морской драги, например?
— У нас главное преимущество в мобильности, если сравнивать со стационарными установками. Тем более, на Чукотке время добычи ограничено из-за климатических условий — максимум четыре месяца в году активной работы. Кроме этого, драга очень большая, дорогая в обслуживании.
А «бегать» никто никуда, конечно, не будет. Под водой или над водой может находится накопитель, его робот заполняет. Потом накопитель поднимают на поверхность, на вспомогательное плавсредство, опускается новый, и процедура повторяется. Может быть реализован такой принцип.

Над созданием глубоководного робота в Бауманке работает сразу несколько кафедр.
— Вы прикидывали по стоимости, сколько горной компании придётся выложить за такой роботизированный комплекс?
— Вы же понимаете, что себестоимость изделия, запущенного в серию, и опытного образца совершенно разная? Стоимость экспериментального образца выше более чем на порядок. Если об опытном образце говорить, то стоимость выше раз в 20–30. Также многое будет зависеть не только от базового шасси, но и другого сопутствующего оборудования. Я бы ориентировался на десятки миллионов рублей для компании.
— А зарубежные аналоги есть?
— Прямых аналогов нет, ориентированных именно под наши задачи. Вообще, конечно, роботами для подводной добычи в мире занимаются. В том числе Япония, Китай. Но нет на рынке таких изделий, чтоб вот прямо купил и тут же начал добывать на Чукотке металл с их использованием. Зарубежные коллеги под свои специфические потребности изделия ориентируют. На другие глубины, температурные режимы, уровень солёности воды и т.д.
— ПО своё у ваших роботов будет? И как насчет комплектующих, отечественные?
- Программное обеспечение сами разрабатываем. А комплектующие пока смешанные: и российские, и дублируем кое-что из дружественных стран. Хотя я бы не сказал, что их нет в российском исполнении, но пока по некоторым комплектующим, по той же электронике в первую очередь, они оказываются лучше, выше уровень готовности, ведь их там применяют уже много лет. Но уверен, что и наши производители подтянутся до их уровня.

Программное обеспечение разрабатывают тоже специалисты Бауманки.
— А дно мирового океана впоследствии ваша техника поможет освоить?
— Это всё-таки разные задачи. Другие глубины, подчас измеряемые километрами. И другие технологии потребуются. Но для нашей страны это очень важно.
— Что же, удачи вам! Постараемся через пару лет вернуться к разговору, оценим предварительные результаты.
Алексей Василивецкий